Power ProblemPower
Design является наиболее важной частью всей печатной платы.
Это часто называют DC-DC (DC-DC), и существует два типа микросхем стабилизатора мощности, которые чаще всего используются в DC-DC: одна называется LDO (линейный стабилизатор с малым падением падения), а другая называется PWM (импульсно-импульсный импульсный источник питания с широтно-импульсной модуляцией). Мы часто слышим, что PWM имеет высокую эффективность, но LDO имеет быстрый отклик. Почему так?
Следующее потребует некоторых теоретических знаний, но все же очень легко понять. Если вы не понимаете, эй, вы должны проверить свои основы.
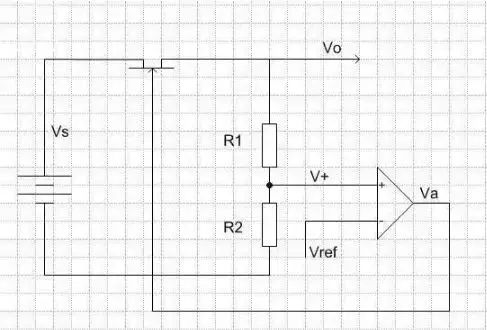
Простая принципиальная схема внутренней структуры линейного регулируемого источника питания
>Это простая принципиальная схема внутренней структуры линейного регулируемого источника питания. Наша цель состоит в том, чтобы получить низкое напряжение Vo из высокого напряжения Vs. На рисунке Vo делится на два резистора, делящих напряжениеrs, чтобы получить V+, V+ направляется на положительную клемму усилителя (мы называем этот усилитель усилителем ошибок), а отрицательная клемма Vref усилителя является внутренним опорным уровнем источника питания (этот опорный уровень постоянен).
Выходная Va усилителя подключена к затвору МОП-транзистора для управления импедансом МОП-транзистора. При увеличении Va импеданс МОП-транзистора увеличивается; при уменьшении Va импеданс МОП-транзистора уменьшается. Падение напряжения на полевых МОП-транзисторах будет Vs-Vo.
Теперь давайте посмотрим, насколько стабилен Vo. Если Vo станет меньше, то V+ станет меньше, и выходная Va усилителя также станет меньше, что приведет к уменьшению импеданса МОП-транзистора, так что через тот же ток разность напряжений МОП-транзистора станет меньше. становится меньше, поэтому Во поднимается вверх, чтобы подавить декреие Во. Точно так же, когда Vo становится больше, V+ становится больше, Va становится больше, а импеданс МОП-транзистора становится больше. После одного и того же тока разность напряжений МОП-транзистора становится больше, поэтому увеличение Vo подавляется.
Как показано на рисунке выше, для получения Vo от высокого напряжения Vs, импульсный источник питания использует прямоугольные волны Vg1 и Vg2 с определенным рабочим циклом для управления верхним и нижним МОП-трубки. Vg1 и Vg2 находятся в противоположных фазах, Vg1 высокий, а Vg2 низкий. При включении верхней МОП-трубки нижняя МОП-трубка выключается; при включении нижней МОП-трубки верхняя МОП-трубка выключается.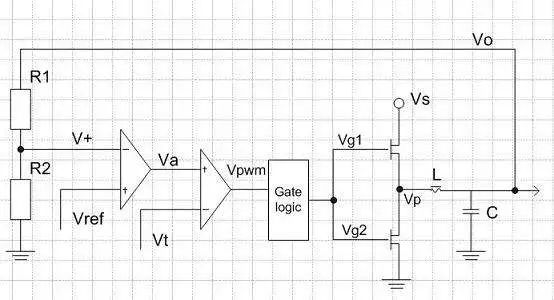
<спan style="font-size: 18px;" >В результате на левом конце L образуется прямоугольное напряжение с определенным скважностью. Катушку индуктивности L и конденсатор C можно рассматривать как фильтр нижних частот. Следовательно, после фильтрации напряжения прямоугольной волны получается отфильтрованное стабильное напряжение Vo.
Vo делится на R1 и R2 и отправляется на отрицательную клемму V+ первого усилителя (усилителя ошибок), выходная Va усилителя ошибок используется в качестве положительной клеммы второго усилителя (усилителя ШИМ), а выходной Vpwm усилителя ШИМ представляет собой Прямоугольная волна с определенным скважностью обрабатывается логической схемой затвора для получения двух прямоугольных волн противоположной фазы Vg1 и Vg2 для управления коммутация МОП-транзисторов.
Положительная клемма Vref усилителя ошибок представляет собой постоянное напряжение, а отрицательная клемма Vt усилителя PWM представляет собой сигнал треугольной волны. Один раз Ва больше, чем треугольная волна, Vpwm высокий; когда Va меньше треугольной волны, Vpwm низкий, поэтому соотношение между Va и треугольной волной определяет рабочий цикл сигнала прямоугольной волны Vpwm; когда Va высокий, рабочий цикл низкий, а когда Va низкий, рабочий цикл высокий.
После обработки Vg1 и Vpwm находятся в одной фазе, а Vg2 и Vpwm — в противоположной фазе; наконец, напряжение прямоугольной волны Vp на левом конце L такое же, как Vg1. Как показано ниже
Когда Vo повышается, V+ будет расти, Va падает, а рабочий цикл Vpwm уменьшается. После логики затвора рабочий цикл Vg1 уменьшается, рабочий цикл Vg2 увеличивается, а рабочий цикл Vp уменьшается, что, в свою очередь, приводит к снижению Voе, так что подъем Во будет подавлен. наоборот.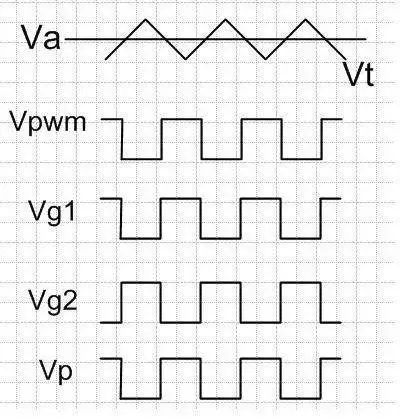
Сравнение линейного
регулируемого источника питания и импульсного источника питанияПоняв принцип работы линейного регулируемого источника питания и импульсного источника питания, мы можем понять, почему линейный регулируемый источник питания имеет меньший шум, более быструю переходную характеристику, но низкую эффективность; в то время как импульсный источник питания имеет больший шум и переходную характеристику Медленнее, но эффективнее.
Внутренняя структура линейного регулируемого источника питания проста, контур обратной связи короткий, поэтому шум небольшой, а переходная характеристика быстрая (при изменении выходного напряжения компенсация быстрая). Но поскольку разница напряжений между входом и выходом приходится на полевой МОП-транзистор, его эффективность низкая. Поэтому линейные регуляторы, как правило, Используется в приложениях с малыми токами и высокими требованиями к точности напряжения.
Импульсный источник питания имеет сложную внутреннюю структуру, множество факторов влияют на шумовые характеристики выходного напряжения, а его петля обратной связи длинная, поэтому его шумовые характеристики ниже, чем у линейного регулируемого источника питания, а его переходная характеристика медленная. Однако, согласно структуре импульсного источника питания, МОП-транзистор находится в двух состояниях: полностью включенном и полностью выключенном. За исключением энергии, потребляемой ведущим МОП-транзистором, и внутреннего сопротивления МОП-транзистора, вся остальная энергия используется для вывода (теоретически L и C не расходуются). энергии, хотя на самом деле это не так, они потребляют небольшое количество энергии).
Некоторые заблуждения о высокоскоростном распознавании сигнала
Высокая скорость смотрит на край сигнала, а не на тактовую частоту. Вообще говоря, если тактовая частота высокая, передний фронт сигнала быстрый, поэтому мы обычно рассматриваем их как высокоскоростные сигналы; Но обратное не обязательно верно. Если тактовая частота низкая, если передний фронт сигнала все еще быстрый, его следует рассматривать как высокоскоростной сигнал. сигнал к ручке.
Согласно теории сигнала, передний фронт сигнала содержит высокочастотную информацию (с помощью преобразования Фурье можно найти количественное выражение), поэтому, как только передний фронт сигнала очень крутой, мы должны относиться к нему как к высокоскоростному сигналу, и вполне вероятно, что передний фронт появится, если дизайн не очень хороший. Слишком медленный, с перелетом, недолетом и звоном.
Поэтому мы должны уделять больше внимания пропускной способности сигнала. Согласно эмпирической формуле, соотношение между пропускной способностью и временем нарастания (10% ~ 90%) составляет Fw * Tr = 3,5.
Oscilloscope Selection Обратите внимание на пропускную способность осциллографа Многие обращают внимание на частоту дискретизации осциллографа, но не на полосу пропускания осциллографа, но часто ширина полосы осциллографа является более важным параметром. Некоторые думают, что до тех пор, пока частота дискретизации осциллографа более чем в два раза превышает тактовую частоту сигнала, это большая ошибка. Причиной ошибки является неправильное понимание теоремы выборки. Теорема выборки гласит, что, когда частота дискретизации более чем в два раза превышает максимальную ширину полосы пропускания сигнала, исходный сигнал может быть идеально восстановлен. Тем не менее, сигнаl, на который ссылается теорема о дискретизации, является сигналом с ограниченной полосой пропускания (полоса пропускания ограничена), что серьезно не согласуется с сигналом в реальности.
Наш общий цифровой сигнал не является периодическим, за исключением часов. В долгосрочной перспективе его спектр бесконечно широк. Для захвата высокоскоростных сигналов он не может слишком сильно искажать свои высокочастотные компоненты. Метрики полосы пропускания осциллографа тесно связаны с этим. Таким образом, реальная проблема по-прежнему заключается в том, что искажение переднего фронта сигнала, захваченного осциллографом, находится в пределах допустимого диапазона.
Итак, сколько осциллографов с высокой пропускной способностью подходит?
Теоретически сигнал, захваченный осциллографом с 5-кратной шириной полосы пропускания, потеряет менее 3% от исходного сигнал. Если требуются более мягкие потери, можно выбрать осциллограф нижнего конца. Использование осциллографа с 3-кратной шириной полосы сигнала должно быть достаточным для большинства требований, но не забывайте о полосе пропускания пробника.