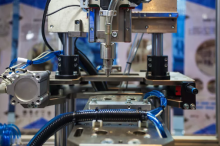
Структура и материалы
Материалы из алюминиевого сплава плюс поверхностная окислительная обработка Rotating base 3-axis structure Физические параметры Механический размер кронштейна: 160 * 280 * 443 мм Вес механического манипулятора составляет около 1,6 кг Вес объекта, который можно зажать, составляет около 500 г Hardware parameters Control chip communication
2-channel serial communication interface 2-way steering gear interface 1-канальный интерфейс связи Bluetooth (CC2540) 8-channel input signal interface 3-полосный 42-шаговый интерфейс привода шагового двигателя 7-way drive (500MA) output signal interface 3-канальный сигнальный интерфейс кодировщика 1-канальный интерфейс CAN-шины One channel Zigbee ( CC2530) communication interface 24V adapter 3 высокоточные подшипники (plain Подшипник 51109, без хода холостого хода) Три 42-ступенчатых высокоточных редуктора (42-ступенчатые двигатели, угол шага 1,8 градуса, точность 5%) Три 500-проводных фотоэлектрических энкодера Высокоточный механический манипулятор с ЧПУ Высокоточный планетарный редуктор (длина 38,5, передаточное отношение 1:13,7, номинальная допустимая нагрузка 40, допустимая мгновенная нагрузка 60) Accessories parameters Experimental support Basic Experiment Embedded System Programming Experiment GPIO experiment Delay experiment OLED Experiment < Stepping motor experiment Encoder experiment Расширенное управление шаговым мотором I Step motor advanced control II Advanced Experiment Point to point control experiment (writing accessories) Тест рулевого механизма (комплект зажима рулевого механизма) < тест на присоску (комплект пневматической присоски) Comprehensive Experiment Эксперимент с диктовкой манипулятора (английский диктант, численный умственный расчет) Performance parameters: Industry классификация: robot/UAV Платформа разработки: STM STM Форма поставки: PCBA, complete machine Сценарий применения: экспериментальное обучение в колледже, контрольное обучение, пошаговое моторное обучение